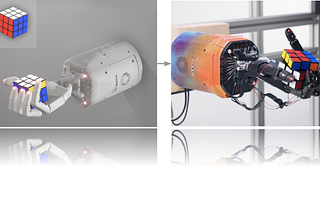
Darshan HegdeSim2Real in Robotic ManipulationThis article contains details on sim2real in robotic manipulation for following tasks:14 min read·Sep 6, 2020----
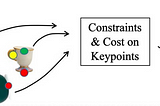
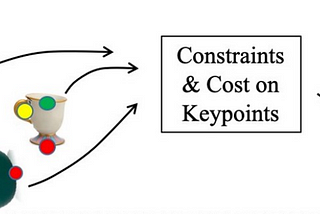
Darshan HegdeKey Point Representations for Robotic ManipulationBonus: Also contains details on how to generate labels and learn semantic instance segmentation.11 min read·Aug 27, 2020----
Darshan HegdeHeuristics for Robotic GraspingGrasping is one of the fundamental subtasks of a robotic manipulation pipeline. Both learning based and physics / geometry based grasping…9 min read·Aug 11, 2020--2--2